

应用解读:皮米精度激光干涉仪如何实现高精度实时位移反馈?
发布日期:2019-12-09
“坐标”这个概念源于解析几何,其基本思想是构建坐标系,将点与实数联系起来,进而可以将平面上的曲线用代数方程表示。坐标的概念应用到工业生产中解决了大量实际问题,例如,坐标测量机可采集被测工件表面上的被测点的坐标值,并投射到空间坐标系中,构建工件的空间模型等诸多案例。
坐标测量机还被用于产品质量控制,测量磨损,制造精度,产品形貌,对称性,角度等工业产品参数,因此需要非常高的移动精度,才能确保测量的准确性。德国attocube公司推出的IDS3010皮米精度位移测量激光干涉仪就是辅助坐标测量机提高测量精度的有力手段。

图1 皮米精度位移测量激光干涉仪IDS3010
IDS3010皮米精度位移测量激光干涉仪是如何帮助坐标测量机实现高精度的呢?
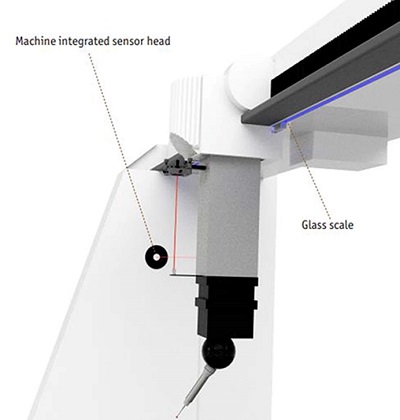
图2 IDS3010激光干涉仪集成到坐标测量机探测臂上
通常坐标测量机要求探测臂位移精度高于1微米,现在坐标测量机位移反馈大多是通过玻璃分划尺来实现的。玻璃分划尺是常用的一种位置测量的方法,分划尺在坐标测量机上位于龙门处,一般情况下,采用玻璃分划尺探测的不是探测臂本身,而是坐标测量机龙门处的位置变化。实际上, 坐标测量机的探测臂与龙门之间有一定长度的距离,它们的位置变化会因存在例如振动、位置差等而有所不同,因此只凭借龙门处位置变化来判断真实的位移反馈是不准确的,影响到实际样品的测量精度。
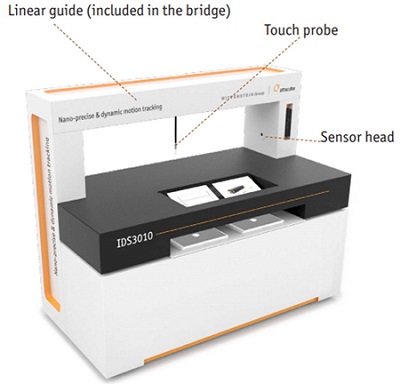
图3 IDS3010激光干涉仪集成到坐标测量机上。
坐标测量机通过干涉仪探头的配合,可精确反馈探测臂的位移。
德国attocube公司的IDS3010皮米精度位移测量激光干涉仪通过非接触式方法测量,可以直接测量探测臂的运动,避免龙门处探测误差,实现高精度测量。如图3,激光探头位于坐标测量机侧边,M12/C7.6激光探头出射的激光可以被探测臂上的反射镜(直径3mm)反射回激光探头,IDS3010干涉仪通过分析干涉信号从而进行位置测量。探测臂能够移动0.8米距离,移动精度达到10微米。干涉仪能够实时测量该探测臂的位移以及振动等信息。
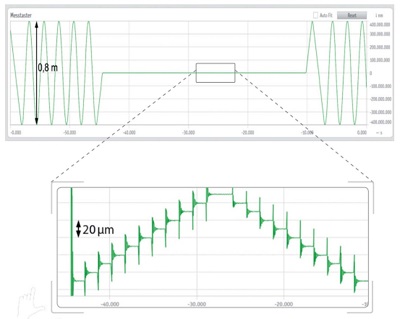
图4 IDS3010实时位置测量软件WAVE测量数据。
扩展图为中间区域的数据放大。
IDS3010配置的软件WAVE可以实时观测与保存测量数据。如图4,坐标测量机的运动数据被测量并记录。图中所示,前15秒与终10秒间的数据是0.8m距离的往复运动。中间时间的数据看似没有变化,但通过WAVE软件的放大功能,我们发现中间时间的探测臂其实进行了10微米的步进运动。同时,通过WAVE软件我们也可以观测到步进运动的详细变化过程。每一个步进大约2秒,在运动初始的时候位移有超过,在大约0.4秒的短时间内位移被调整为10微米的步进长度。而在步进的末尾,也有小幅的位置噪音,该噪音一般是由于振动引入。这对于精准探测样品位移以及振动信息具有重大意义。
IDS3010皮米精度位移测量激光干涉仪具有体积小、适合集成到工业应用与同步辐射应用中的特点,同时,测量精度高,分辨率高达1 pm,是适合工业集成与工业网络无缝对接的理想产品。除与坐标测量机结合使用外,在工业中的其他应用实例也非常广泛,包括闭环位移反馈系统搭建、振动测量、轴承误差测量等等。

